Previously, I wrote a lot about Hybrid Dynamic Systems and simulating a simple bouncing ball.
Can we use this framework to simulate a video game? Before we dig in, the first post borrowed mostly theory from "Analyzing Action Games: A Hybrid Systems Approach" paper by Yegeta Zeleke and friends. This post is heavily based on math and implementations in the paper. I'm mostly writing up their model in Python, and leaned heavily on the Matlab reference implementation to help me.
The Python is all mine, but the actual algorithms to solve the problem and the ideas are all theirs.
The Model of Flappy Bird
Ok, to recap, I need four functions:
-
flow(...)tells me how the game changes over time, by taking in the current time and state, and giving me the derivative of the state with respect to time -
jump(...)tells me how the game changes instantly, snapping from one state to another. It takes in the current time and state and returns a new state. -
flow_check(...)tells me if the game should be flowing or not. It takes in the current time and state and returns an integer (0 for not flowing, 1 for flowing). It's gotta be anintto work with other libraries to use this model. -
jump_check(...)tells me if the game should jump or not. It takes in the current time and state and returns an integer (0 for do not jump, 1 for jump). It's gotta be anintfor the same reasonsflow_checkdoes.
All these functions deal with state... so what state does flappy bird need? We'll need both vertical and horizontal position because those will change. We'll need vertical velocity because the rate that the bird rises (or falls) changes based on time and input-- if you're pressing the flap button, you go up.
Oh! And something to track if the player is pushing the flap button or not. And, I know that eventually this all needs to be an array-like.
from collections import namedtuple
# as before, a named tuple doesn't really solve our problems
# but it does make the constructor a little nicer
# its easy enough to make a class that implements the right protocols, but compactness, yeah?
State = namedtuple('State', ['x_pos', 'y_pos', 'y_vel', 'pressed'])
state = State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=1)
print(state)
State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=1)
Ok, so let's march through, starting with flow. Flappy always moves right at a constant speed, so the derivative of their x position is a constant velocity. When they're falling, Flappy accelerates-- so when pressed == 0, y position should change according to whatever y velocity is, and y velocity should change at a magic -9.81 acceleration due to gravity. pressed should never change during flows, because it only changes on jumps: new input jumps flappy to new states. Therefore, it's derivative is 0. So flow looks a little like...
# delta here is just shorthand for "change in"
# what this is tracking is how the corresponding state elements change over time
StateDerivative = namedtuple('StateDerivative', ['delta_x_pos', 'delta_y_pos', 'delta_y_vel', 'delta_pressed'])
def flow(time:float, state:State) -> tuple[float, float, float, int]:
return StateDerivative(
delta_x_pos=2.0, # this is a bit of an extra magic number-- its our going right constant speed.
delta_y_pos=state[2], # this is y_vel in our state vector
delta_y_vel=-9.81,
delta_pressed=0
)
# time, just like before, is arbitrary. May as well start at 0.
state_derivative = flow(0.0, State(
x_pos=0.0,
y_pos=2.0,
y_vel=0.0,
pressed=1
))
print(state_derivative)
StateDerivative(delta_x_pos=2.0, delta_y_pos=0.0, delta_y_vel=-9.81, delta_pressed=0)
But... that's only half the problem, right? What about when flappy is flapping? Flappy flaps kinda... oddly.
Flappy doesn't accelerate when they flap. They move upward at a constant velocity.
For anyone new 'round these parts: this is common in action games like platformers! It makes characters easier to control and more predictable-- if your button presses applied acceleration, rather than pure velocity, you'd need to counteract your current trajectory before going somewhere new. It'd make poor flappy a lot less agile.1
So, lets add all that in:
def flow(time:float, state:State) -> tuple[float, float, float, int]:
if state[3] == 0: # <-- ✨ New! ✨ not pressed
return StateDerivative(
delta_x_pos=2.0,
delta_y_pos=state[2],
delta_y_vel=-9.81,
delta_pressed=0
)
# also ✨ New! ✨, this handles our pressed case
elif state[3] == 1: #pressed
return StateDerivative(
delta_x_pos=2.0,
delta_y_pos=2.0, # just like the change in x position, this is also pretty magic
delta_y_vel=0, # y velocity doesn't change, it's constant while flapping!
delta_pressed=0
)
else:
raise RuntimeError(f"Invalid state! {state}, pressed != 0 or 1")
unpressed_state_derivative = flow(0.0, State(
x_pos=0.0,
y_pos=2.0,
y_vel=0.0,
pressed=0
))
print("How we flow when the flap button is not pressed:")
print(unpressed_state_derivative)
print("\n")
pressed_state_derivative = flow(0.0, State(
x_pos=0.0,
y_pos=2.0,
y_vel=0.0,
pressed=1 #<-- ✨ note the difference! ✨
))
print("How we flow when the flap button is pressed:")
print(pressed_state_derivative)
How we flow when the flap button is not pressed:
StateDerivative(delta_x_pos=2.0, delta_y_pos=0.0, delta_y_vel=-9.81, delta_pressed=0)
How we flow when the flap button is pressed:
StateDerivative(delta_x_pos=2.0, delta_y_pos=2.0, delta_y_vel=0, delta_pressed=0)
That seems about right to me! And since we're here, let's do flow_check... once again, this function has big "you're pranking me" energy.
def flow_check(time:float, state:State) -> int:
# yeah, we're always flowing again. 🙃
return 0
Ok, jump time. Well, flappy only jumps when we provide input. We need to both record that in the state, so we'll flow correctly, and also set flappy's y velocity to what it should be when the button is pressed.
jump_check is... just gonna never jump for now. We can check to make sure flappy falls correctly before adding more complex logic.
def jump(time:float, state:State) -> tuple[float, float, float, int]:
# a jump is the instant when the flap button is pressed
new_pressed = abs(state[3] - 1) # a bit of a trick to flip 1 to 0 and 0 to 1. Not efficient. That'll come up later
if new_pressed == 1: #if we're going from not pressed to pressed...
return State(
x_pos=state[0],
y_pos=state[1],
y_vel=2.0, # using the same magic number as our rightward velocity!
pressed=new_pressed
)
else:
return State(
x_pos=state[0],
y_pos=state[1],
y_vel=state[2],
pressed=new_pressed # almost an exact copy, except we change the pressed flag
)
def jump_check(time:float, state:State) -> int:
return 1 # never jump for now
old_state = State(
x_pos=0.0,
y_pos=2.0,
y_vel=0.0,
pressed=0
)
new_pressed_state = jump(0.0, old_state)
print("For pressing the button:")
print(f"Jumping from {old_state}")
print(f"to {new_pressed_state}")
print("----------")
old_state = State(
x_pos=0.0,
y_pos=2.0,
y_vel=0.0,
pressed=1
)
new_released_state = jump(0.0, old_state)
print("For releasing the button:")
print(f"Jumping from {old_state}")
print(f"to {new_released_state}")
For pressing the button:
Jumping from State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=0)
to State(x_pos=0.0, y_pos=2.0, y_vel=2.0, pressed=1)
----------
For releasing the button:
Jumping from State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=1)
to State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=0)
Alright. I'm gonna steal the Hybrid System and System Parameters structs from the last article. And while I'm there, lets snag the solve_system function too. And the graphing code, so we can see what this system does.
aaaannnnnnd

Ok, well, that's not the most compelling graph I've seen in my entire life. Once again, we're going under 0, when that's our unofficial death floor. There's also no obstacles. Or even flapping.
Let's start with the last thing because it's in the name: let's make this flappy bird flap.
Making Flappy Bird Flap
We use the jump function to move to the "flapping" state from the "falling" state (and from "falling" back to "flapping"). We know we should be jumping when jump_check says so.
So, when do we want jump_check to be 1? Well, lets just hard code it to say "after 0.5 time units from when the sim starts, a player presses the flap button. They release it at 0.6 time units".
def jump_check(time:float, state:State) -> int:
# ✨ New! ✨
# we know our sim runs from time 0 to time 1, for right now. lets hardcode two jumps, one to set the "pressed"
# element in our state vector, and one to unset it
# if the button isn't being pressed, and we're in the range where we want it to be pressed
# say that we need to jump to press it
if time >= 0.5 and time < 0.6 and state[3] != 1:
return 0
# and the reverse is true here, although we only care about time after the pressing
elif time >= 0.6 and state[3] != 0:
return 0
# otherwise we're not jumping
else:
return 1
jump_check.terminal = True # required for scipy

Alright, that's starting to look a little better. Obviously, hardcoding jump points isn't where we want to be in life, but hey! Flappy has a trajectory that looks sane!
Now we need collision detection, so the simulation stops when Flappy hits the bottom or top of the screen.
Making Flappy Bird Die
So, uh, how are we going to do this? We could have a new state, dead and jump to it when flappy collides with the floor or roof. But, that'll lead to a lot of wasted work after we get into the dead state: the sim will still spin forward until it gets to end_time with noting meaningful to do. We want to stop the sim early.
We know that jump_check stops the sim early (with jump_check.terminal = True), so collision is like a jump where we just stop simulating2. Let's add a collision detection function and modify both jump_check and solve_system:
# ✨ New! ✨ Check to see if we're colliding with anything and need to die
def check_collision(state:State) -> bool:
# the "height" of the level is gonna be a little arbitrary and hardcoded for now
# as always, y position of 0 is our floor and means death
if state[1] <= 0.0 or state[1] >= 5.0:
return True
else:
return False
# lets change jump_check to identify collisions
def jump_check(time:float, state:State) -> int:
# ✨ New! ✨
if check_collision(state):
return 0
if time >= 0.5 and \
time < 0.6 and \
state[3] != 1:
return 0
elif time >= 0.6 and \
state[3] != 0:
return 0
else:
return 1
jump_check.terminal = True # we've got a new function, so we need to set this again
# and now we also need to change solve_system to distinguish between solution stops-- did we
# stop flowing because we hit something or because we started jumping?
def solve_system(system:HybridSystem, params:SystemParameters, start_state:State) -> list[Any]:
solution:list[Any] = [] # gradual typing is neat!
cur_time = params.start_time
number_of_jumps = 0
state = start_state
while (cur_time < params.end_time and number_of_jumps < params.max_jumps):
if(system.flow_check(cur_time, state) == 0):
ode_sol = integrate.solve_ivp(
system.flow,
(cur_time, params.end_time),
state,
events=[system.jump_check],
max_step=0.01,
atol=1e-6,
rtol=1e-6
)
if ode_sol.status == -1:
print(f"Solver failed with message: {ode_sol.message}")
return solution
for time, state in zip(ode_sol.t, ode_sol.y.T):
solution.append((time, state))
cur_time, state = solution[-1]
# ✨ New! ✨
# check_collision is very cheap, so this call isn't too outrageous. In real games, collision detection
# is expensive. We'd probably only want to call it once, jump to a dead state, and check if we died
# at the top of the loop instead.
if check_collision(state):
return solution
if (system.jump_check(cur_time, state) == 0):
state = jump(cur_time, state)
number_of_jumps += 1
return solution

Stuff To Dodge
Having an upper and lower bound is all well and good, but really Flappy Bird is hard because there are pipes to dodge. Flap around. We need to add some obstacles, but we don't really need things like "sprites", "graphics" or "art" in simulation land. We just care that there are some rectangular death zones spaced somewhat regularly apart.
I could start by hardcoding the pipe locations just like the level boundaries, but uuuuh. Look, I didn't love hardcoding in the boundaries in the last part and I want to eventually graph where the death zones are. It's time for some data structures.
from pprint import pprint
@dataclass
class BoundingBox():
""" Its a rectangle! Represented by the top left point, a width and a height
"""
top_left: tuple[float, float]
width: float
height: float
@dataclass
class FlappyLevel():
""" It's a flappy bird level! We get a ceiling (going too high means death),
a floor (going too low means death), and a list of obstacles (touching means death)
"""
floor:float
ceiling:float
obstacles: list[BoundingBox]
sample_level = FlappyLevel(
floor=0.0,
ceiling=5.0,
obstacles=[
BoundingBox(
top_left=(1.0, 5.0),
width=0.5,
height=3.5
),
BoundingBox(
top_left=(1.5, 0.75),
width=0.5,
height=0.75
)
]
)
pprint(sample_level)
FlappyLevel(floor=0.0,
ceiling=5.0,
obstacles=[BoundingBox(top_left=(1.0, 5.0), width=0.5, height=3.5),
BoundingBox(top_left=(1.5, 0.75),
width=0.5,
height=0.75)])
Ok, not the prettiest printing of all time there, but it'll do. Now, we need to update our jump_check function to actually use it. So, let's just add an argument-- oh.
well, uh.
hm.
Remember that jump_check must be in a very particular form because it's going to get called by scipy owned code as a part of solve_ivp. We can't just add an argument, the solver doesn't know anything about the level. There are a few ways to go forward here:
1. we control how jump_check executes and what it's scope is. We can save the level as a variable that's in scope while jump_check is doing its thing
2. that, but more formal: classes and objects
Which means, ugh, variable lifetime and all the other annoying things you need to start thinking about when you move from beyond easy "function only operates on its arguments" land3. Eventually, we're going to want to run many simulations on one level, so wrapping up everything as a "simulation" class makes sense to me. The stuff that stays the same from run to run becomes class attributes, and we can pass the stuff that differs to a solve_system instance method.
Because bound methods of instances work like a regular old callable from the outside, we can have the object "ride along" with invocation, with our solver being non-the-wiser 4
Does that make sense? I hope so. 3,2,1, let's jam.
from util.print import blog_print
from dataclasses import dataclass
@dataclass
class SystemParameters:
start_time: float
end_time: float
max_jumps: int
# ✨ New! ✨ moving hardcoded terms out to this parameters structure
pressed_velocity: float # how fast should flappy rise when the button is pressed?
horizontal_velocity: float # how fast should flappy go to the right
gravity_acceleration:float # acceleration due to gravity
class FlappyHybridSim:
""" This simulation class combines all the simulation constants: level, simulation parameters and ye four
functions.
"""
level: FlappyLevel
cur_params: SystemParameters | None # only gets set while we're in solve_system, None otherwise
# why aren't these in system params? They don't change! I want to keep these the same
# across many simulation runs
max_step:float
atol:float
rtol:float
__slots__ = "level", "cur_params", "max_step", "atol", "rtol"
def __init__(self, level:FlappyLevel):
self.level = level
self.cur_params = None
self.max_step=0.01
self.atol=1e-6
self.rtol=1e-6
# ✨ New! ✨ logic to make sure we're not hitting a box, and integration with our level data structure
def solve_system(self, params:SystemParameters, start_state:State) -> list[Any]:
solution:list[Any] = [] # gradual typing is neat!
self.cur_params = params
cur_time = params.start_time
number_of_jumps = 0
state = start_state
if(self._flow_check(cur_time, state) == 0):
ode_sol = integrate.solve_ivp(
self._flow,
(cur_time, params.end_time),
state,
events=[self._jump_check],
max_step=self.max_step,
atol=self.atol,
rtol=self.rtol
)
if ode_sol.status == -1:
print(f"Solver failed with message: {ode_sol.message}")
return solution
for time, state in zip(ode_sol.t, ode_sol.y.T):
solution.append((time, state))
cur_time, state = solution[-1]
if self._check_collision(state):
self.cur_params = None
return solution
if (self._jump_check(cur_time, state) == 0):
state = self._jump(cur_time, state)
number_of_jumps += 1
self.cur_params = None
return solution
# ✨ New! ✨ We're integrating the level into this function!
def _check_collision(self, state:State) -> bool:
if state[1] <= self.level.floor or state[1] >= self.level.ceiling:
return True
# we need to actually see if we're inside a death box or not
# in a real game, we'd want to do a location based query (tell me what's nearby so I only check against nearby
# things) but our level is so simple right now, we can just test against all the geometry
for box in self.level.obstacles:
# I'm like 99% sure there's a way to rephrase this hellish if statement
# this'll get called within our solver, so state has lost it's nice property names :c
if state[0] >= box.top_left[0] and \
state[0] <= box.top_left[0] + box.width and \
state[1] >= box.top_left[0] and \
state[1] <= box.top_left[1] + box.height:
return True
return False
# our four hybrid system functions have been refactored to work with the new constants in
# self.cur_params (and also get an _ prefix to say: "hey, don't call this")
def _flow(self, time:float, state:State) -> tuple[float, float, float, int]:
# this little test shows that our extra flexibility-- moving things like
# horizontal velocity to a passed in parameter-- is not free: we have an extra check
# to perform now
if not self.cur_params:
raise RuntimeError("Unable to get run parameters!")
if state[3] == 0:
return StateDerivative(
delta_x_pos=self.cur_params.horizontal_velocity,
delta_y_pos=state[2],
delta_y_vel=self.cur_params.gravity_acceleration,
delta_pressed=0
)
elif state[3] == 1: #pressed
return StateDerivative(
delta_x_pos=self.cur_params.horizontal_velocity,
delta_y_pos=self.cur_params.pressed_velocity,
delta_y_vel=0,
delta_pressed=0
)
else:
raise RuntimeError(f"Invalid state! {state}, pressed != 0 or 1")
def _flow_check(self, time:float, state:State) -> int:
return 0
def _jump(self, time:float, state:State) -> tuple[float, float, float, int]:
if not self.cur_params:
raise RuntimeError("Unable to get runtime parameters!")
new_pressed = abs(state[3] - 1)
if new_pressed == 1:
return State(
x_pos=state[0],
y_pos=state[1],
y_vel=self.cur_params.pressed_velocity,
pressed=new_pressed
)
else:
return State(
x_pos=state[0],
y_pos=state[1],
y_vel=state[2],
pressed=new_pressed
)
def _jump_check(self, time:float, state:State) -> int:
if self._check_collision(state):
return 0
if time >= 0.5 and \
time < 0.6 and \
state[3] != 1:
return 0
elif time >= 0.6 and \
state[3] != 0:
return 0
else:
return 1
_jump_check.terminal = True
single_run_params = SystemParameters(
start_time=0.0,
end_time=5.0,
max_jumps=5,
pressed_velocity=2.0,
horizontal_velocity=2.0,
gravity_acceleration=-9.81
)
start_state = State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=0.0)
sim = FlappyHybridSim(sample_level)
solution = sim.solve_system(single_run_params, start_state)
blog_print(solution, lambda line: f"State at {line[0]:0.04f}: {[f'{val:0.04f}' for val in line[1]]}")
State at 0.0000: ['0.0000', '2.0000', '0.0000', '0.0000']
State at 0.0100: ['0.0200', '1.9995', '-0.0981', '0.0000']
State at 0.0200: ['0.0400', '1.9980', '-0.1962', '0.0000']
...
State at 0.4800: ['0.9600', '0.8699', '-4.7088', '0.0000']
State at 0.4900: ['0.9800', '0.8223', '-4.8069', '0.0000']
State at 0.5000: ['1.0000', '0.7737', '-4.9050', '0.0000']
Ugh, as a graph, please?

Ok, well, it's not the best level of all time but it is a level! I'm gonna make a better level. And just as a fun little treat, what if I didn't have to write a Flappy bird level by hand each time? I don't really have a good way to do that-- writing out all that level data by hand in Python isn't a super funky fresh time. How about some procedural level generation, as a treat?
A Little Procedural Level Generation, as a Treat
Procedural level generation, it's aesthetics and dynamics, what its good at and what its bad at, is a debated topic. I'm mostly writing a level generator as a replacement for writing a level design tool-- and also because the original matlab had one, so I don't have to think too hard about an algorithm5
Here's a weird thing about Flappy Bird levels: the pipes are always aligned with each other. My mismatched death boxes never happens. It also kinda looks like the pipes are regularly spaced apart, too. I'm gonna mark up a screenshot from a Java clone of the original Flappy Bird with some distance relationships in a snippet:
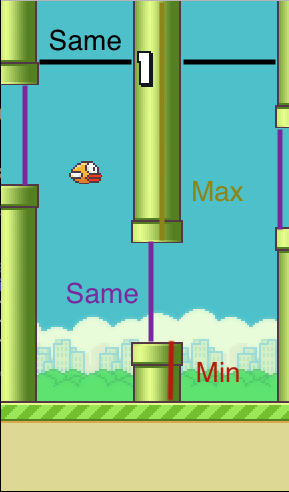
The horizontal distance between pipes is always the same, and the vertical gap between pipes is also always the same. There's a minimum height for a pipe to be, and a corresponding maximum height. Flappy Bird levels aren't very random at all, when you look at it. So, uh, what might an algorithm for generating a level look like?
Well, I can place a pair of pipes, a top pipe and bottom pipe, at some regular interval. Say, uh, 2. So, the first pair of pipes would go at, say, x position 1. Then the next pair of pipes would go in at 1 + pipe_width + 2. The third pipe would go at (1 + pipe_width + 2) + pipe_width + 2, and so on. It's recursive! Gotta love to see it.
For heights, we know there's always a fixed gap between pipes... lets say, 1. We know there's a minimum pipe height, let's also make that 1. We can than randomly pick a bottom pipe hight from 1 - 3, and we can figure out our top pipe hight by all the constraints we've placed (keeping with our convention that the ceiling is at 5, and the floor is at 0). if the bottom pipe is 1 tall, then there's a gap of 1, which means the top pipe must be 3 tall. And because the top pipe must always have at least a hight of 1 and that there must always be a gap of at least 1, the bottom pipe can't be any taller than 3.
It's a little funny how deeply constrained this whole thing is, at least to me. Let's write some Python:
import random
from typing import Optional
def generate_flappy_level(seed: Optional[int]) -> FlappyLevel:
# hold up partner, what's that seed argument?
# it's a magic number to kick off random choices-- rnd(seed) will always give the same sequence of numbers.
# this is mostly useful for developers to get repeatable behavior from code that needs randomness for debugging
# or evaluation. It's also used by Slay the Spire players to find unwinnable games.
if seed: random.seed(seed)
# this is a bunch of stuff that should be parameters (really, wrapped up in a struct as like FlappyLevelGenParams or some such)
# but works well enough for explaining the procedure
lower_bound: float = 0.0
upper_bound: float = 5.0
x_start: float = 1.0
x_period: float = 2.0
heights: List[float] = [1, 1.5, 2, 2.5, 3] # breaking down our "random height from 1-3" into five distinct choices. It'll add a little chop to the level, which I think is good, actually
pipe_width: float = 0.7
gap: float = 1.0
num_gaps: int = 6 # this is the size of our level, in terms of "number of gaps between pipes to clear".
# As we'll see later, this is more than long enough before we hit other problems.
pipes = []
for i in range(num_gaps):
left_side = x_start + x_period * i
bottom_pipe_height = random.choice(heights)
top_pipe_height = upper_bound - (bottom_pipe_height + gap)
pipes.append(BoundingBox((left_side, bottom_pipe_height), pipe_width, bottom_pipe_height))
pipes.append(BoundingBox((left_side, upper_bound), pipe_width, top_pipe_height))
return FlappyLevel(lower_bound, upper_bound, pipes)
hybrid_system_params = SystemParameters(
start_time=0.0,
end_time=5.0,
max_jumps=5,
pressed_velocity=2.0,
horizontal_velocity=2.0,
gravity_acceleration=-9.81
)
start_state = State(x_pos=0.0, y_pos=2.0, y_vel=0.0, pressed=0.0)
generated_level = generate_flappy_level(99)
sim = FlappyHybridSim(generated_level)
solution = sim.solve_system(hybrid_system_params, start_state)

Yeah, just like that! We can even watch our poor sim bomb out now that the "pipes" are in a more correct place.
Huh.
Maybe we should like, figure out how to control Flappy the Bird better than just hardcoding the poor avian.
-
this isn't a bad thing-- how you program movement is a game design choice like any other, and with plenty of pros and cons. ↩
-
this is obviously not true in general-- collision can be a jump to a state where you can no longer continue on your current trajectory (hitting a wall). Maybe the hypothetical game has a health bar and you just jump to a state with less life. ↩
-
The Haskell people were right, this sucks ↩
-
this behavior is not free-- I do pay a penalty for passing in the instance as the first argument, but lord, do I have bigger problems elsewhere. ↩
-
ok, a look behind the curtain: I originally wrote this whole simulation system in Python last year. I've only recently started rewriting everything up as these blog posts. As part of my original work, I wrote a procedural level generation system. I have the Python code here. I swore I cribbed it from the original paper's Matlab reference implementation. But, now that I'm writing this blog post, I can't find it. The Matlab code has five fixed choices for a simulation level, but no procedure for generating one on the fly. I'm still not convinced that I came up with this, not that it's particularly clever but I'm particularly dumb. I'm sticking to my story. ↩